自动驾驶传感器的选择与布置
↓自动驾驶-传感器↓
 智驾最前沿
智驾最前沿自动驾驶-传感器#自动驾驶
视频号
❤更多精彩视频欢迎关注视频号❤
今年号称是激光雷达元年!各厂家纷纷发布搭载激光雷达的车型,不光是新势力,如小鹏、蔚来,也包括传统汽车厂家,如上汽、长城、北汽等,都是计划今明两年量产。
同时,毫米波雷达数量,也从1~5颗拓展到6~8颗,已有应用4D成像雷达车型;摄像头,除了前视和环视摄像头,侧向4颗+后向1颗摄像头已基本成为标配。这里简单梳理下自动驾驶传感器方案发展路线(乘用车),以及各类型传感器发展趋势。 乘用车自动驾驶发展,根据应用的场景不同可分为:行车自动驾驶和泊车自动驾驶。由于行车和泊车运行场景有很大不同,在传感器选择上很大区别。同时,需要综合考虑各类型传感器性能、成本、布置位置等因素。行车主要运行工况为中高速,需要选用检测距离较远的传感器。目前应用传感器主要有:摄像头、毫米波雷达、激光雷达。泊车运行在低速,一般选用检测距离10m内传感器。目前应用传感器主要有:超声波雷达、鱼眼摄像头。
乘用车自动驾驶发展,根据应用的场景不同可分为:行车自动驾驶和泊车自动驾驶。由于行车和泊车运行场景有很大不同,在传感器选择上很大区别。同时,需要综合考虑各类型传感器性能、成本、布置位置等因素。行车主要运行工况为中高速,需要选用检测距离较远的传感器。目前应用传感器主要有:摄像头、毫米波雷达、激光雷达。泊车运行在低速,一般选用检测距离10m内传感器。目前应用传感器主要有:超声波雷达、鱼眼摄像头。 车辆周边区域,可以大致划分为4大区域:正前区域A、侧前区域B、侧向区域C、后向区域D和侧后区域E(如下图):-对于行车自动驾驶,A区域是重中之重,布置传感器也最为丰富。最远感知距离一般需要200m以上;其次是侧后E区域和测前B区域,用于变道和横穿等场景,最远感知距离一般需要80m以上。-对于泊车自动驾驶,需要对车辆四周全覆盖。由于泊车时速度一般在10km/h内,感知距离范围在10m内就能满足要求。行车自动驾驶发展可大致分三个阶段:单车道自动驾驶辅助、多车道自动驾驶辅助和点对点自动导航驾驶。-单车道自动驾驶辅助:通过前视单目摄像头或前向毫米波雷达,可实现自动紧急制动AEB和自适应巡航ACC功能。毫米波雷达的优势在于对车辆速度的探测,而摄像头的优势在于识别车道线和对障碍物分类。前视单目摄像头和前向毫米波雷达结合一起应用,可实现单车道高速驾驶辅助HWA和交通拥堵辅助TJA功能。-多车道自动驾驶辅助:要实现变道辅助,需要增加传感器对邻道环境进行感知。通常在车尾部两角各增加1个毫米波雷达,实现对车辆侧后环境感知。进一步,可增加车前毫米波角雷达,拓展侧前环境感知,实现路口辅助JA、紧急车道保持ELK、紧急转向辅助ESA等功能。-点对点自动导航驾驶:要实现从一个点到另个点全自动驾驶,需要对车辆周边环境进行全方位感知,同时增加冗余。一般需要前视增加激光雷达、侧视和后视增加摄像头和毫米波实现增强感知,同时,增加高精地图和惯性导航进行定位。自动行车,目前发展到点对点自动导航驾驶阶段。主流传感器方案为:激光雷达x1~3+毫米波雷达x5~8+ADS摄像头x7~10。泊车自动驾驶发展大致可分四个阶段:倒车辅助、自动泊车、记忆泊车和代客泊车。-倒车辅助:通过倒车雷达和全景影像,实现倒车时碰撞预警和提供车辆四周环境影像辅助倒车。倒车雷达,一般车前、车后各安装4颗超声波雷达;全景影像,一般在车辆四周共安装4颗鱼眼摄像头。-自动泊车:在倒车雷达基础上,车侧两边各增加2个长距超声波泊车雷达识别车位,达到共12颗超声波雷达,实现自动泊车。进一步,可与全景摄像头融合,实现对线性车位感知,增强实现自动泊车场景。也可与钥匙、手机APP结合,实现在驾驶员监控下的遥控泊车功能。-记忆泊车:实现100m内寻迹泊车。不需要额外加装传感器,但泊车系统需要融合前视行车摄像头数据,通过VSLAM构建地图。进一步,可跟后视行车摄像头数据融合,实现寻迹倒车功能。-代客泊车:实现1km内自动泊车。需要增加高精地图和惯性导航定点,同时跟停车场系统结合,实现停车场内无人自动驾驶泊车。自动泊车,目前发展到记忆泊车/代客泊车阶段,各厂家传感器方案都是采用超声波雷达x12+环视摄像头x4方案,同时,需要与行车传感器融合。
车辆周边区域,可以大致划分为4大区域:正前区域A、侧前区域B、侧向区域C、后向区域D和侧后区域E(如下图):-对于行车自动驾驶,A区域是重中之重,布置传感器也最为丰富。最远感知距离一般需要200m以上;其次是侧后E区域和测前B区域,用于变道和横穿等场景,最远感知距离一般需要80m以上。-对于泊车自动驾驶,需要对车辆四周全覆盖。由于泊车时速度一般在10km/h内,感知距离范围在10m内就能满足要求。行车自动驾驶发展可大致分三个阶段:单车道自动驾驶辅助、多车道自动驾驶辅助和点对点自动导航驾驶。-单车道自动驾驶辅助:通过前视单目摄像头或前向毫米波雷达,可实现自动紧急制动AEB和自适应巡航ACC功能。毫米波雷达的优势在于对车辆速度的探测,而摄像头的优势在于识别车道线和对障碍物分类。前视单目摄像头和前向毫米波雷达结合一起应用,可实现单车道高速驾驶辅助HWA和交通拥堵辅助TJA功能。-多车道自动驾驶辅助:要实现变道辅助,需要增加传感器对邻道环境进行感知。通常在车尾部两角各增加1个毫米波雷达,实现对车辆侧后环境感知。进一步,可增加车前毫米波角雷达,拓展侧前环境感知,实现路口辅助JA、紧急车道保持ELK、紧急转向辅助ESA等功能。-点对点自动导航驾驶:要实现从一个点到另个点全自动驾驶,需要对车辆周边环境进行全方位感知,同时增加冗余。一般需要前视增加激光雷达、侧视和后视增加摄像头和毫米波实现增强感知,同时,增加高精地图和惯性导航进行定位。自动行车,目前发展到点对点自动导航驾驶阶段。主流传感器方案为:激光雷达x1~3+毫米波雷达x5~8+ADS摄像头x7~10。泊车自动驾驶发展大致可分四个阶段:倒车辅助、自动泊车、记忆泊车和代客泊车。-倒车辅助:通过倒车雷达和全景影像,实现倒车时碰撞预警和提供车辆四周环境影像辅助倒车。倒车雷达,一般车前、车后各安装4颗超声波雷达;全景影像,一般在车辆四周共安装4颗鱼眼摄像头。-自动泊车:在倒车雷达基础上,车侧两边各增加2个长距超声波泊车雷达识别车位,达到共12颗超声波雷达,实现自动泊车。进一步,可与全景摄像头融合,实现对线性车位感知,增强实现自动泊车场景。也可与钥匙、手机APP结合,实现在驾驶员监控下的遥控泊车功能。-记忆泊车:实现100m内寻迹泊车。不需要额外加装传感器,但泊车系统需要融合前视行车摄像头数据,通过VSLAM构建地图。进一步,可跟后视行车摄像头数据融合,实现寻迹倒车功能。-代客泊车:实现1km内自动泊车。需要增加高精地图和惯性导航定点,同时跟停车场系统结合,实现停车场内无人自动驾驶泊车。自动泊车,目前发展到记忆泊车/代客泊车阶段,各厂家传感器方案都是采用超声波雷达x12+环视摄像头x4方案,同时,需要与行车传感器融合。 根据布置位置,车载摄像头可分为:前置摄像头(含ADS摄像头、行车记录仪、夜视、环视前置摄像头等)、侧置摄像头、后置摄像头和内置摄像头。对于高阶自动驾驶,ADS摄像头一般为7~10颗。侧视和后视通常共5颗,差异主要在前视摄像头。前视摄像头一般采用长焦+广角两摄像头方案。有的为了识别深度,采用双目立体摄像头方案,但对标定、算法要求比较高。华为在极狐上采用的是长焦+广角+双目共4颗摄像头方案。另外,前视摄像头一般集成图像采集和视觉处理,直接输出目标物。随着目前计算集中化,摄像头有向“只采集不计算”方向发展趋势:把计算部分放到域控制器中。如特斯拉前视摄像头,未配置SoC、MCU等计算模块。
根据布置位置,车载摄像头可分为:前置摄像头(含ADS摄像头、行车记录仪、夜视、环视前置摄像头等)、侧置摄像头、后置摄像头和内置摄像头。对于高阶自动驾驶,ADS摄像头一般为7~10颗。侧视和后视通常共5颗,差异主要在前视摄像头。前视摄像头一般采用长焦+广角两摄像头方案。有的为了识别深度,采用双目立体摄像头方案,但对标定、算法要求比较高。华为在极狐上采用的是长焦+广角+双目共4颗摄像头方案。另外,前视摄像头一般集成图像采集和视觉处理,直接输出目标物。随着目前计算集中化,摄像头有向“只采集不计算”方向发展趋势:把计算部分放到域控制器中。如特斯拉前视摄像头,未配置SoC、MCU等计算模块。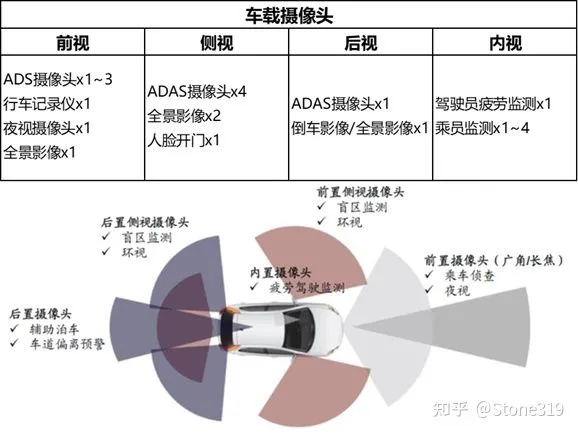 毫米波雷达最大优势是对车辆速度的识别,一般是车辆前视区域A必备传感器。安装在车辆前后4角位置的毫米波角雷达,用于拓展多车道驾驶辅助功能。部分车型在高级自动驾驶上毫米波雷达应用已拓展到后视区域D和侧视区域C,如长城摩卡传感器,毫米波雷达搭载数量已达到8颗。技术发展上,4D成像雷达具有:可实现“高度”探测、分辨率更高、可实现对静态障碍物分类等优势,主要集中在前视区域应用,达到类似低线数激光雷达效果。目前上汽R品牌-ES33已搭载了2颗采埃孚的4D毫米波雷达,安装在车辆前保险杠,探测距离超过300米。另外,毫米波手势雷达、生命体征监测雷达也值得关注。目前车内监测主要以摄像头为主,但是摄像头会涉及到个人隐私问题,毫米波雷达则能够减少这个顾虑。森思泰克已开发出STA60-1手势雷达和STA79-4生命体征监测雷达。其中,STA79-4生命体征监测雷达,已在广汽蔚来合创007上搭载应用。森思泰克 STA79-4生命体征监测雷达(来源网络)激光雷达应用,主要受制于成本。随着MEMS、纯固态技术的成熟,激光雷达价格有望发生大幅下降,而激光雷达价格下降促进激光雷达出货量提升将进一步为激光雷达带来规模效应促进其成本下降。对于激光雷达三大核心零部件-激光发射器、激光探测器、扫描部件:-短期受限于成本以及有限的智能驾驶场景,普遍采用905nm激光发射器+Si激光探测器+转镜/MEMS扫描方案;-长期来看性能更加优异且可适应更多智能驾驶场景需求的1550nm激光发射器+InGaAs激光探测器+纯固态及FMCW扫描方案。-目前国内车型搭载的激光雷达,扫描方式基本都采用转镜方案,激光发射器采用905nm和1550nm都有。
毫米波雷达最大优势是对车辆速度的识别,一般是车辆前视区域A必备传感器。安装在车辆前后4角位置的毫米波角雷达,用于拓展多车道驾驶辅助功能。部分车型在高级自动驾驶上毫米波雷达应用已拓展到后视区域D和侧视区域C,如长城摩卡传感器,毫米波雷达搭载数量已达到8颗。技术发展上,4D成像雷达具有:可实现“高度”探测、分辨率更高、可实现对静态障碍物分类等优势,主要集中在前视区域应用,达到类似低线数激光雷达效果。目前上汽R品牌-ES33已搭载了2颗采埃孚的4D毫米波雷达,安装在车辆前保险杠,探测距离超过300米。另外,毫米波手势雷达、生命体征监测雷达也值得关注。目前车内监测主要以摄像头为主,但是摄像头会涉及到个人隐私问题,毫米波雷达则能够减少这个顾虑。森思泰克已开发出STA60-1手势雷达和STA79-4生命体征监测雷达。其中,STA79-4生命体征监测雷达,已在广汽蔚来合创007上搭载应用。森思泰克 STA79-4生命体征监测雷达(来源网络)激光雷达应用,主要受制于成本。随着MEMS、纯固态技术的成熟,激光雷达价格有望发生大幅下降,而激光雷达价格下降促进激光雷达出货量提升将进一步为激光雷达带来规模效应促进其成本下降。对于激光雷达三大核心零部件-激光发射器、激光探测器、扫描部件:-短期受限于成本以及有限的智能驾驶场景,普遍采用905nm激光发射器+Si激光探测器+转镜/MEMS扫描方案;-长期来看性能更加优异且可适应更多智能驾驶场景需求的1550nm激光发射器+InGaAs激光探测器+纯固态及FMCW扫描方案。-目前国内车型搭载的激光雷达,扫描方式基本都采用转镜方案,激光发射器采用905nm和1550nm都有。
对国内主流高阶自动驾驶车型传感器方案进行了梳理如下图:-华为方案堪称豪华,不过售价也挺“豪华”,不知用户会不会买单;-小鹏的智能化一直被津津乐道。这次P5搭载2颗激光雷达,售价如果真能控制在20万内那就香了;-首次搭载4D毫米波成像雷达的上汽R汽车ES33,不知会不会引领潮流,这可能得跟激光雷达降本趋势博弈。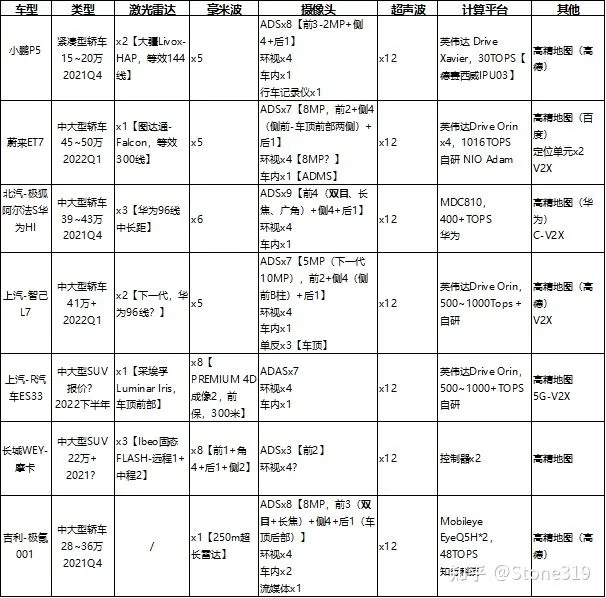 转载自汽车电子与软件,文中观点仅供分享交流,不代表本公众号立场,如涉及版权等问题,请您告知,我们将及时处理。
转载自汽车电子与软件,文中观点仅供分享交流,不代表本公众号立场,如涉及版权等问题,请您告知,我们将及时处理。
上一篇:【KHGEARS钧兴谐波 | 聚焦】6月全国工业机器人产量达20761套,同比增长29.2%
下一篇:汽车4D毫米波雷达的发展
